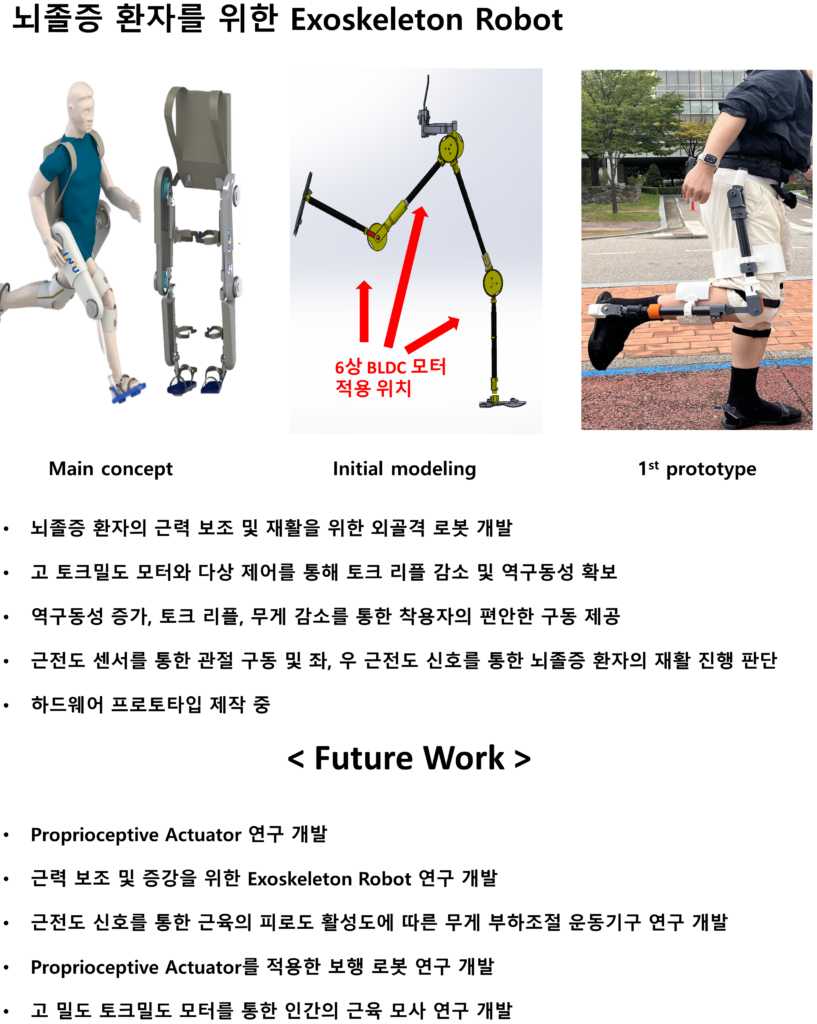
By applying the multi-phase control high torque density motor we developed to the existing exoskeleton robot, we can reduce torque ripple and get reverse driveability.