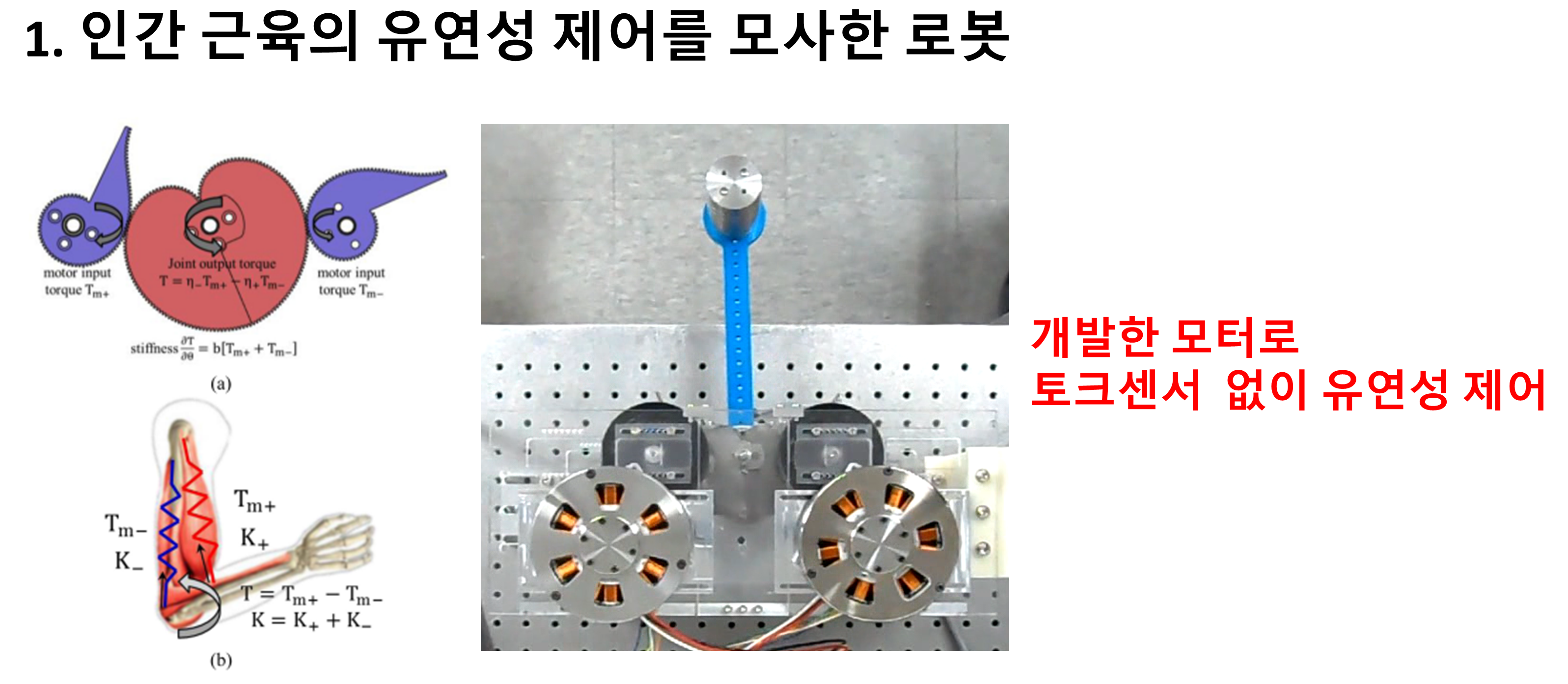
We developed a variable radius gear transmission inspired by Muscle Cross-Bridge Kinematics. This transmission can generate desired stiffness values without sensors to control joint stiffness.