Pysical Human-Robot Interaction by using 6 – Phase BLDC Motor for Improving Torque Density of Robot Actuator
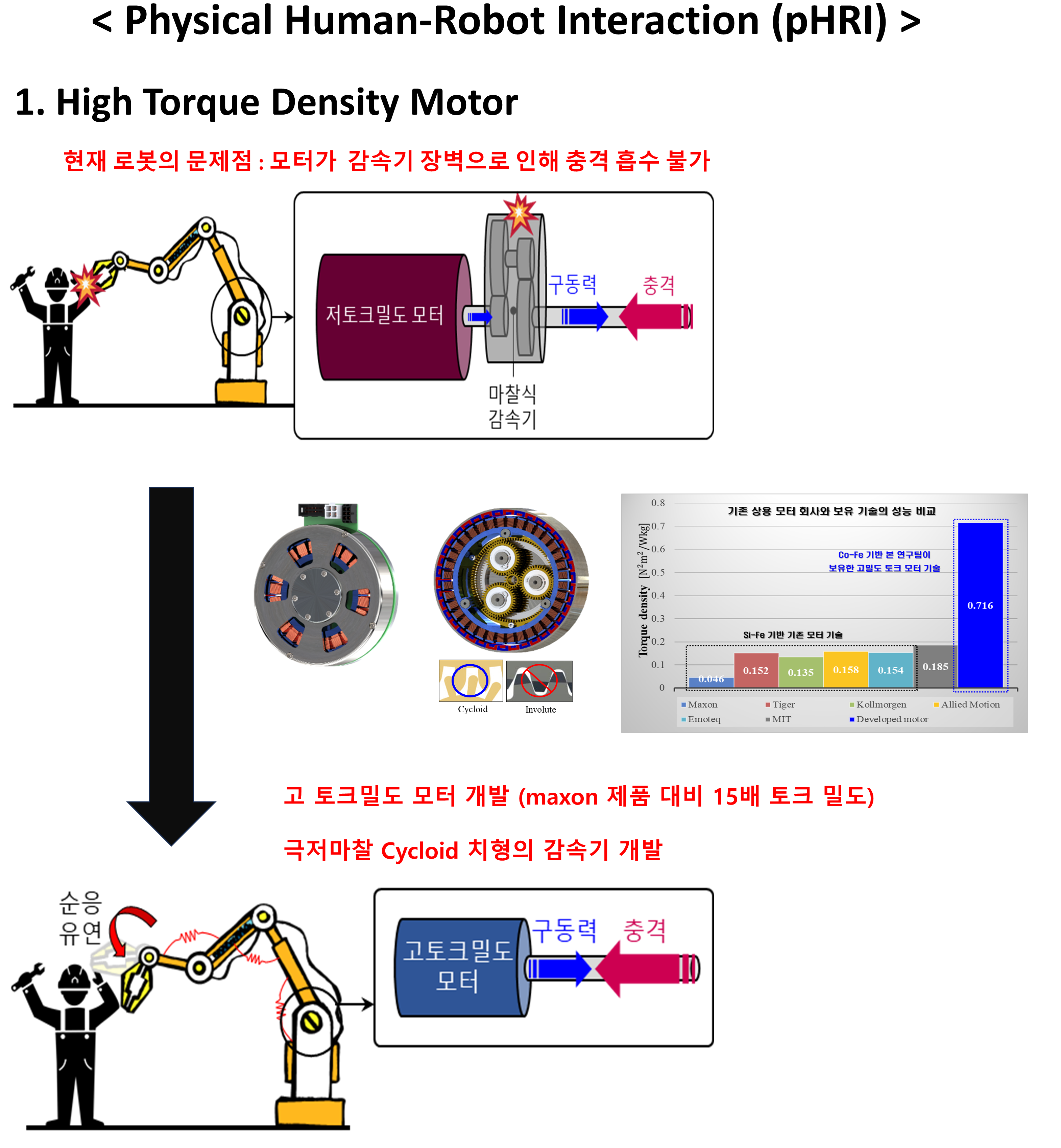
To solve the problem of current general robots that cannot absorb shock due to the limitations of the motor’s reducer, we developed a reducer using a high torque density motor (15 times the torque density of other products) and an ultra-low friction cycloid tooth shape.
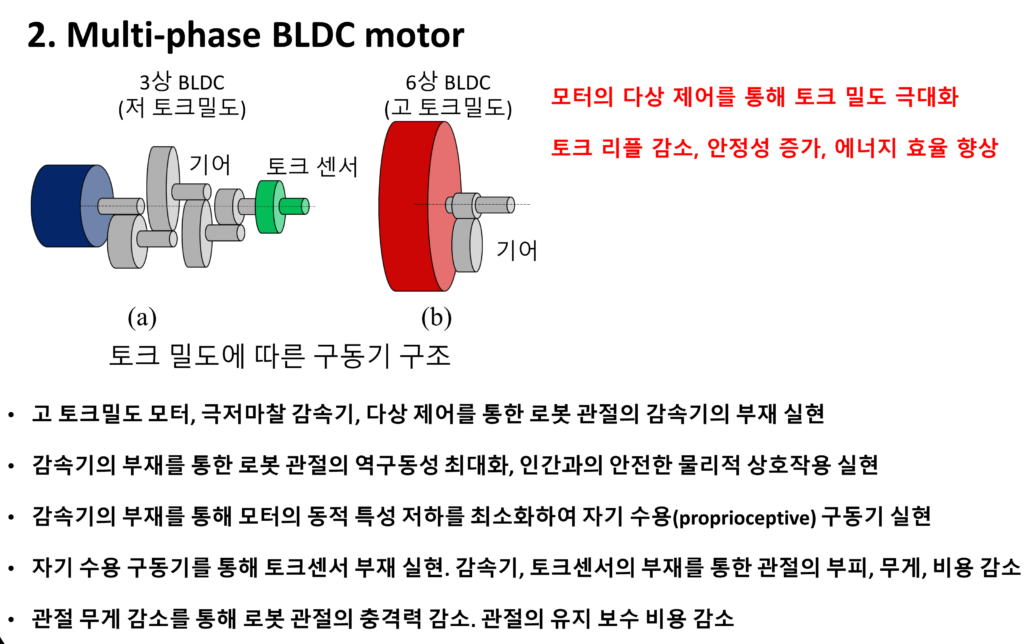
By maximizing torque density through multi-phase control of the motor, effects such as reduced torque ripple, increased stability, and improved efficiency can be achieved.